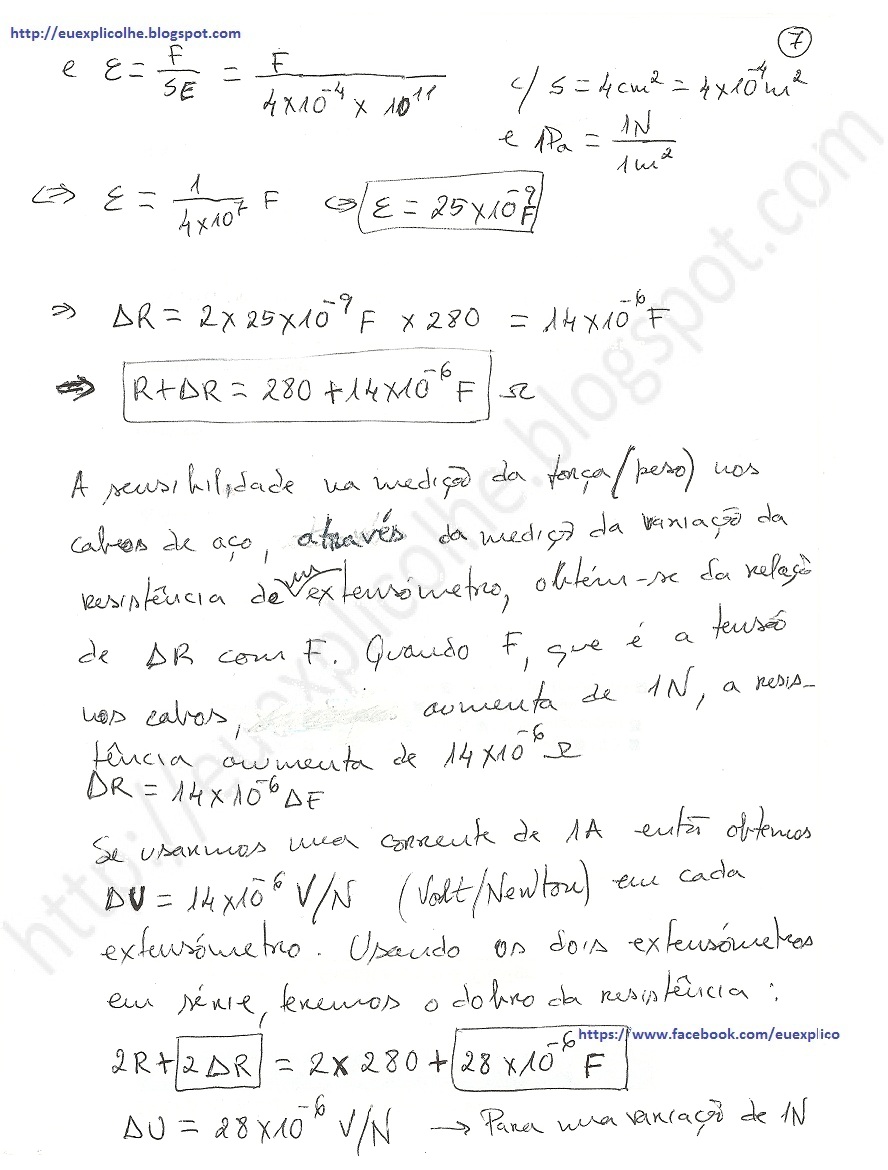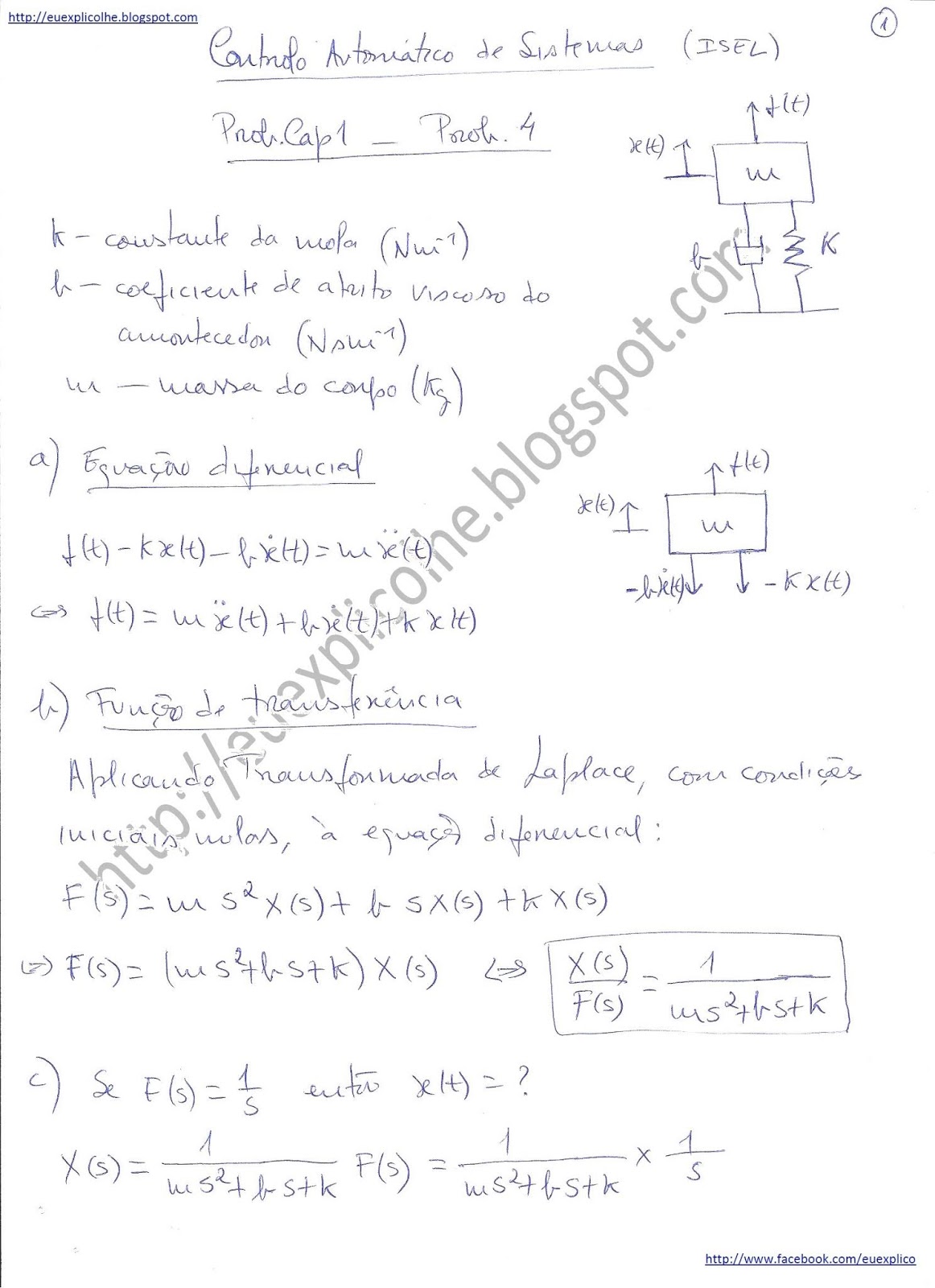
Modelo matemático, em equação diferencial, de um sistema constituído por uma massa, uma mola e um amortecedor. A Massa está presa a uma parede pela mola e pelo amortecedor e é-lhe aplicada uma força em forma de degrau unitário.
Estuda-se o efeito, na resposta ao degrau, da alteração dos parâmetros: constante da elasticidade da mola, valor da massa e constante do amortecedor.
Código em Matlab para a 1ª simulação:
M=2; B=0.2; K=1;
s = tf('s'); sys1 = 1/(M*s^2+B*s+K)
hold on;
t =0:0.01:120; U = ones(size(t));
U(1:100)=0;
y = lsim(sys1,U,t);
plot(t,U,'r','linewidth',2);hold on;
plot(t,y,'k','linewidth',2); grid on
legend('Força: U=1N', 'Deslocamento em relação ao ponto de equilíbrio [metro]');
xlabel('tempo[s]');
title('Resposta de um sistema Massa Mola Amortecedor à entrada degrau unitário', 'M=2kg, B=0.2Ns/m, k=1N/m');



Se quiser explicações sobre matérias que encontre neste blogue, contacte-nos, de preferência por email. Este blogue destina-se à divulgação dos nossos serviços. É apenas uma pequena amostra do que sabemos e podemos fazer. Veja a Lista de Matérias já disponíveis para explicações.